New Lightweight Gripper from Fraunhofer Institute
Reducing weight can be a key factor in machine building for the packaging industry
Lightweight construction experts from the Fraunhofer Institute for Manufacturing Engineering and Automation IPA have optimized a suction pad so that it weighs considerably less and can be produced with a 3D printer. The advantage: The robot on which the gripper is mounted can move faster and with less effort.
It only takes about ten seconds and even experienced engineers have to look closely to understand what is happening: Two moving halves of an injection molding machine separate and a robot arm approaches. The machine uses pins to push 24 circular plastic components out of their shape, which are simultaneously sucked in by the robot’s vacuum gripper.
Aluminium and pneumatic cylinders meet 3D printing
The gripper consists of two aluminum plates that can move independently of each other and are each equipped with two pneumatic cylinders and twelve contour pieces with integrated suction cups. The lower twelve contour pieces remove half-finished plastic components and feed them to the next operation. The upper ones remain rigid during this process; they transport the finished cast components, which they then place on an assembly line.
Werkzeugbau Siegfried Hofmann GmbH from Lichtenfels in Upper Franconia develops and produces the two-piece vacuum gripper for an automotive supplier. To date, it has weighed a whole 21 kg with its 24 contour pieces, the two movable aluminum plates with pneumatic cylinders and a further base plate. If it were lighter, the robot on which the gripper is mounted could either move faster or consume less energy at the same speed.
To achieve this and be able to manufacture the gripper with 3D printers in the future, researchers from the Department of Lightweight Construction Technologies at the Fraunhofer IPA and Hofmann have optimized it accordingly. The tool and machine manufacturer has a great deal of know-how in the areas of gripper systems and 3D printing.
A filigree framework instead of solid plates
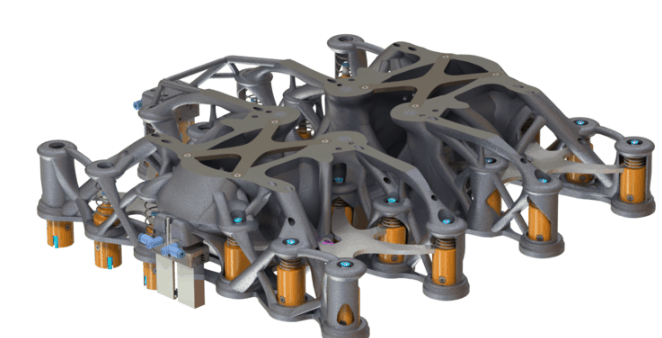
The result is a model for a vacuum gripper with a completely new appearance: instead of the solid aluminium plates, Christoph Birenbaum and his team developed a filigree, branched scaffold that is designed to withstand exactly those forces that act on the gripper while it picks up the plastic components.
“We’ve left out everything superfluous,” explains Birenbaum. The researchers have banished the lines to the individual suction heads into the interior of the scaffolding, which is why the optimized vacuum gripper now looks more tidy.
But the scientists have also changed the way the gripper works. They replaced the pneumatic cylinders with lighter pressure springs that now move the 24 suction pads individually. The pins that push the plastic components out of their moulds in the injection molding machine now also push in the springs. Locking devices keep them pressed in as long as the robot arm is positioned.
Up to 15 kilograms less weight
If one printed out the revised vacuum gripper, it would weigh 14 kilos – seven kilos less than the original version. Even greater weight savings would be possible:
“If the gripper was made of plastic instead of aluminum, it would weigh only six kilos,” says Birenbaum. “Our simulations show that even a plastic gripper would withstand the forces acting on it during handling. The only question is whether it could withstand the high temperatures around an injection molding machine in the long term.
It is also unclear how much time or energy could be saved with the reduced gripper. “This can only be quantified when we know on which robots the lightweight vacuum gripper is used,” explains Birenbaum. So there is no way around practical tests before Hofmann can produce the gripper in series.
Source: ipa.fraunhofer.de – Press release



